{kind=link}
Un’auto elettrica su un altro mondo: la Luna
Dopo i successi delle prime missioni Apollo, l’esigenza di poter esplorare spazi più ampi si rese indispensabile. Le escursioni degli astronauti erano limitate a poche centinaia di metri, e lo sforzo per muoversi con le pesanti tute spaziali era alto, pur con 1/6 della gravità terrestre.
A partire da Apollo 15 avrebbero portato con sé un veicolo a propulsione elettrica.
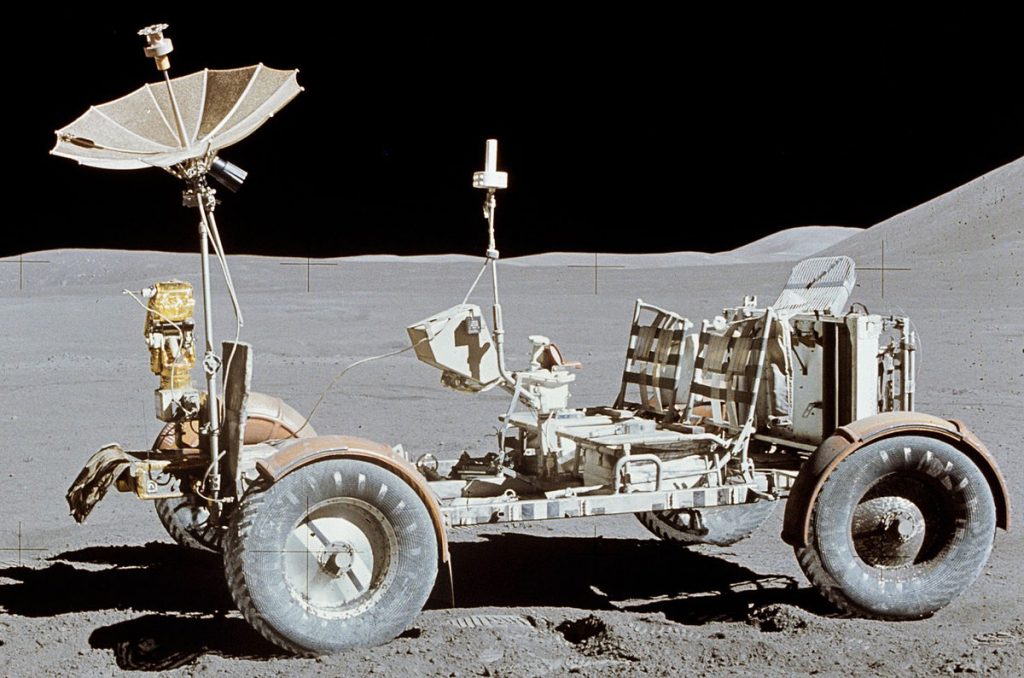
Il Lunar Roving Vehicle (LRV) era un veicolo elettrico progettato per funzionare nel vuoto a bassa gravità della Luna e per essere in grado di muoversi sulla superficie lunare, consentendo agli astronauti di estendere il raggio delle loro attività extraveicolari nella superficie lunare.
Tre LRV furono guidati sulla Luna, uno sull’Apollo 15 dagli astronauti David Scott e Jim Irwin, uno sull’Apollo 16 da John Young e Charles Duke e uno sull’Apollo 17 da Gene Cernan e Harrison Schmitt.
Ogni rover è stato utilizzato nel corso di tre giorni di ciascuna missione.
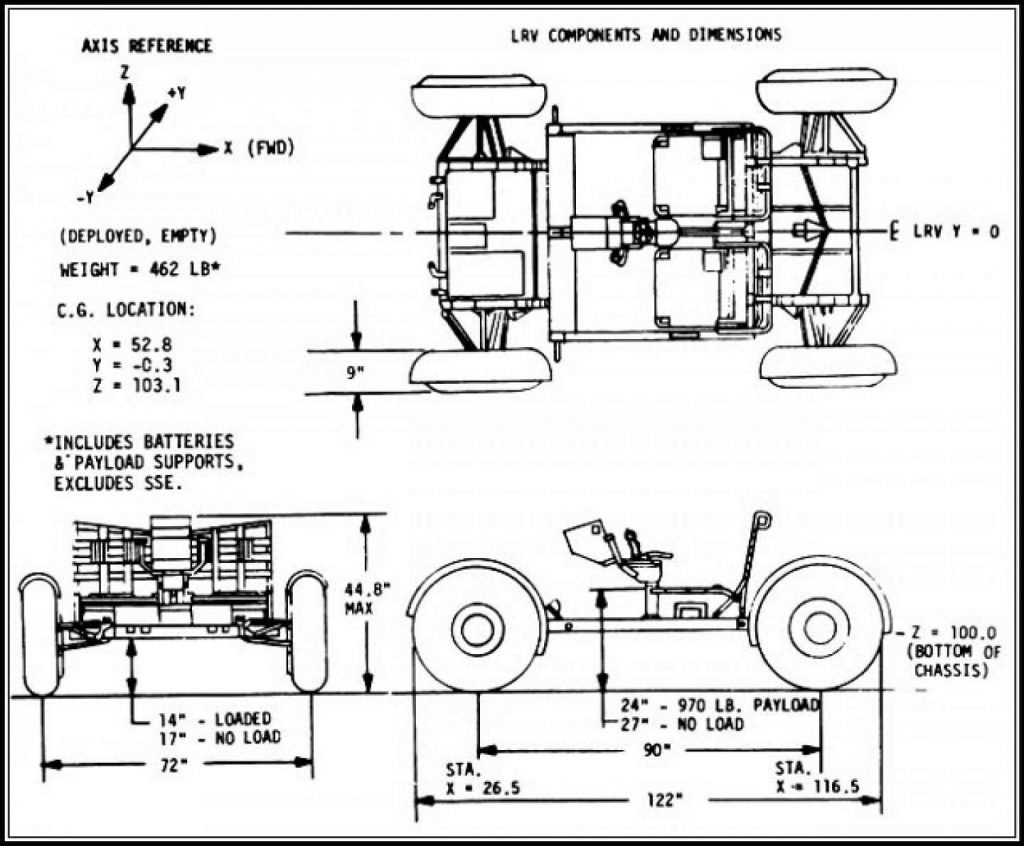
ll Lunar Roving Vehicle aveva una massa di 210 kg ed è stato progettato per contenere un carico utile di ulteriori 490 kg sulla superficie lunare. Il telaio era lungo 3,1 metri con un passo di 2,3 metri.
Dimensioni.
L’altezza massima era di 1,14 metri. Il telaio era costituito da gruppi saldati di tubi in lega di alluminio e consisteva in un telaio diviso in 3 parti incernierato al centro, in modo che potesse essere piegato e appeso al lato del modulo lunare.
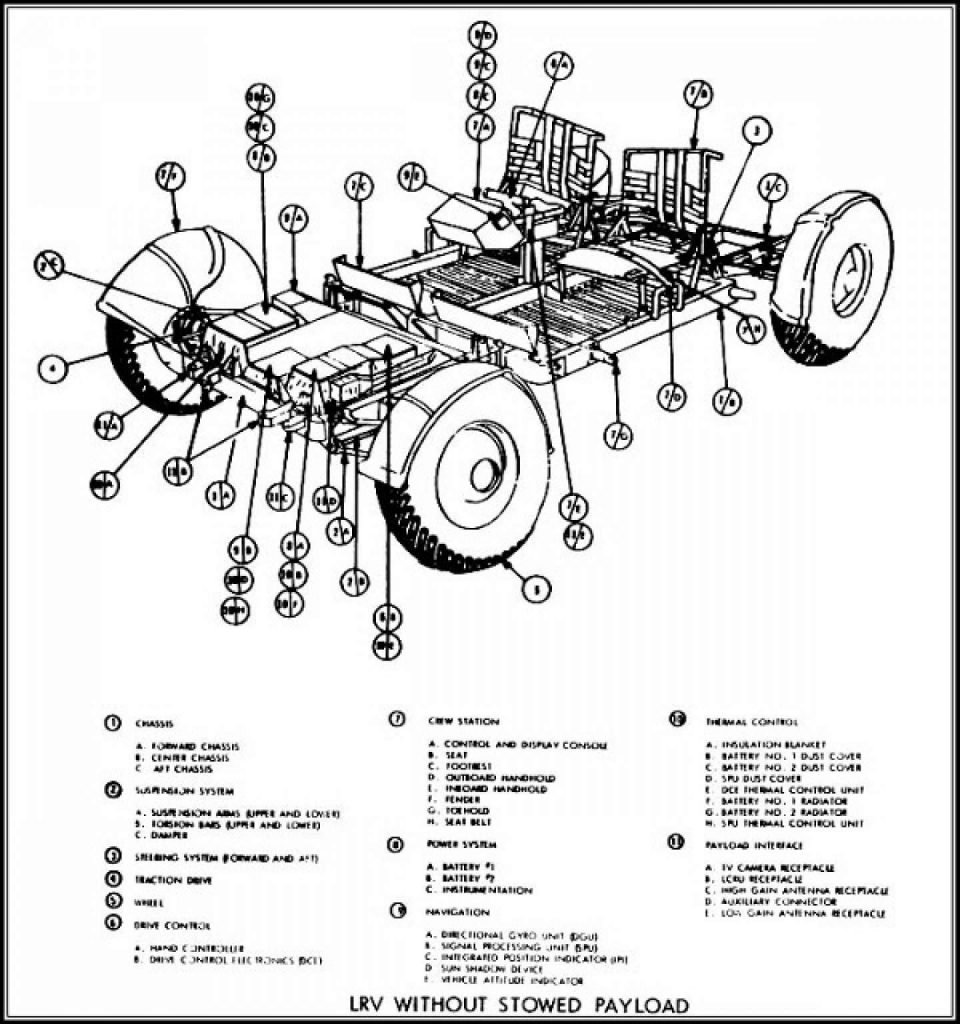
Due posti, come una spider.
Aveva due sedili pieghevoli affiancati realizzati in tubolare di alluminio con cinghie di nylon e pannelli del pavimento in alluminio. Un bracciolo era montato tra i sedili e ogni sedile aveva poggiapiedi regolabili e cintura di sicurezza in velcro.
Collegato direttamente con la Terra.
Un’antenna parabolica a maglie larghe era montata su un albero nella parte centrale anteriore del rover, essa consentiva di trasmettere direttamente a terra. La sospensione consisteva in un doppio braccio oscillante orizzontale con barre di torsione superiore e inferiore e un’unità ammortizzatore tra il telaio e il braccio trasversale superiore. A pieno carico, l’LRV aveva un’altezza da terra di 36 cm.

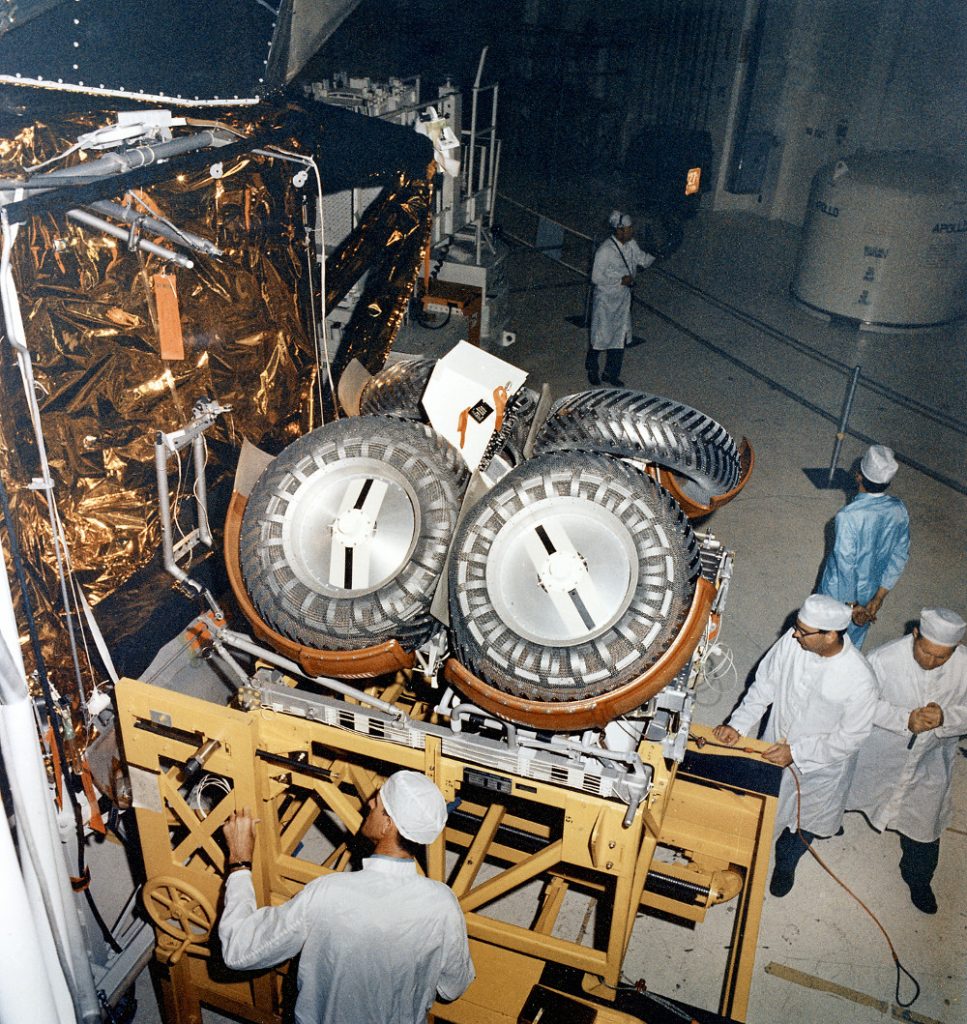
Ruote speciali per un ambiente speciale.
Le ruote erano costituite da un mozzo in alluminio e da un pneumatico di 81,8 cm di diametro e 23 cm di larghezza realizzato con trefoli di acciaio zincato intrecciati di 0,083 cm di diametro attaccati al cerchio e dischi di alluminio formato.

All’interno del pneumatico c’era un telaio antiurto del diametro di 64,8 cm per proteggere il mozzo. I parapolvere erano montati sopra le ruote. Ogni ruota aveva il proprio azionamento elettrico, un motore da 0,25 CV a corrente continua collegato alla ruota tramite una trasmissione e un’unità di frenatura meccanica.

Alta manovrabilità
La capacità di manovra era fornita attraverso l’uso di ruote sterzanti anteriori e posteriori. Ciascun motore sterzante era in grado di erogare 0,1 hp.
Entrambi i gruppi di ruote giravano in direzioni opposte, fornendo un raggio di sterzata di 3,1 metri, ma potevano essere disaccoppiate, in modo da utilizzare solo un set per lo sterzo.
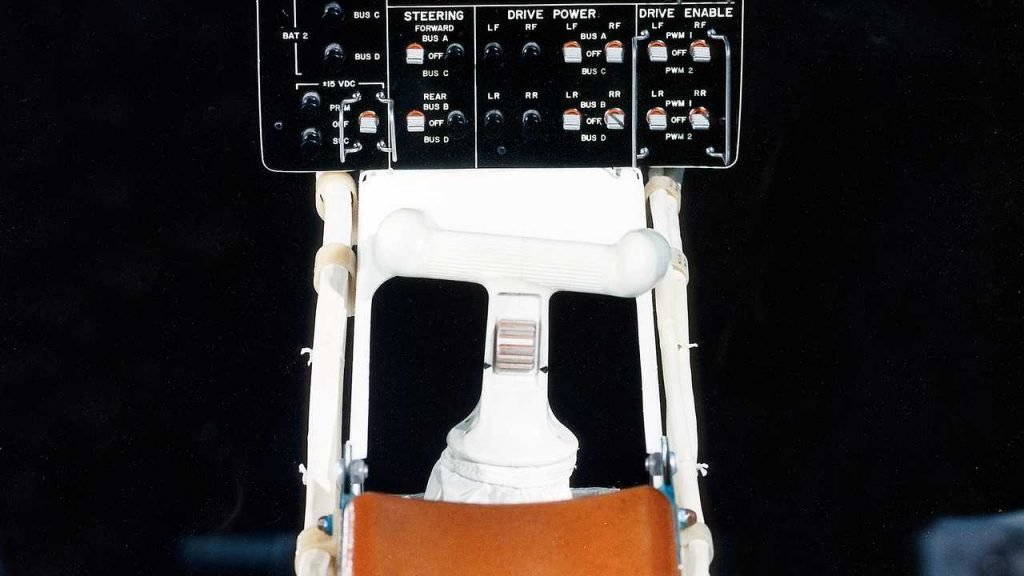
Il sistema di alimentazione.
L’alimentazione era fornita da due batterie non ricaricabili all’idrossido di potassio argento-zinco da 36 volt, con una capacità di 121 amp-h. Alimentavano i motori di trasmissione e dello sterzo, l’unità relè di comunicazione e la telecamera TV.
Una pulsantiera a forma di T situata tra i due sedili controllava i quattro motori di trazione, i due motori dello sterzo e i freni.
La navigazione si basava sulla registrazione continua della direzione e della distanza attraverso l’uso di un giroscopio direzionale e del contachilometri, un computer avrebbe tenuto traccia della direzione complessiva e della distanza dal LM.
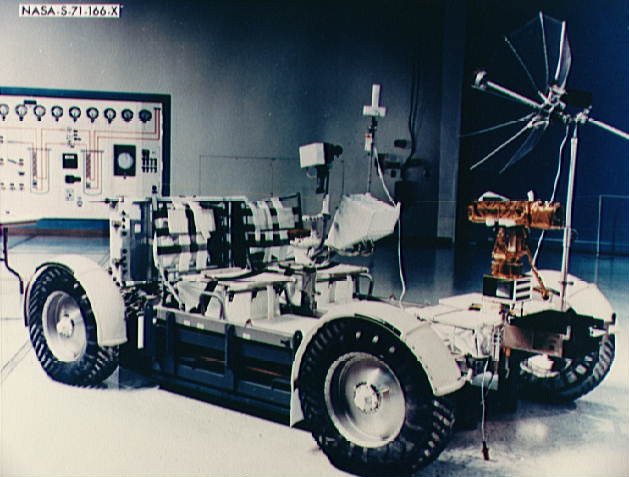
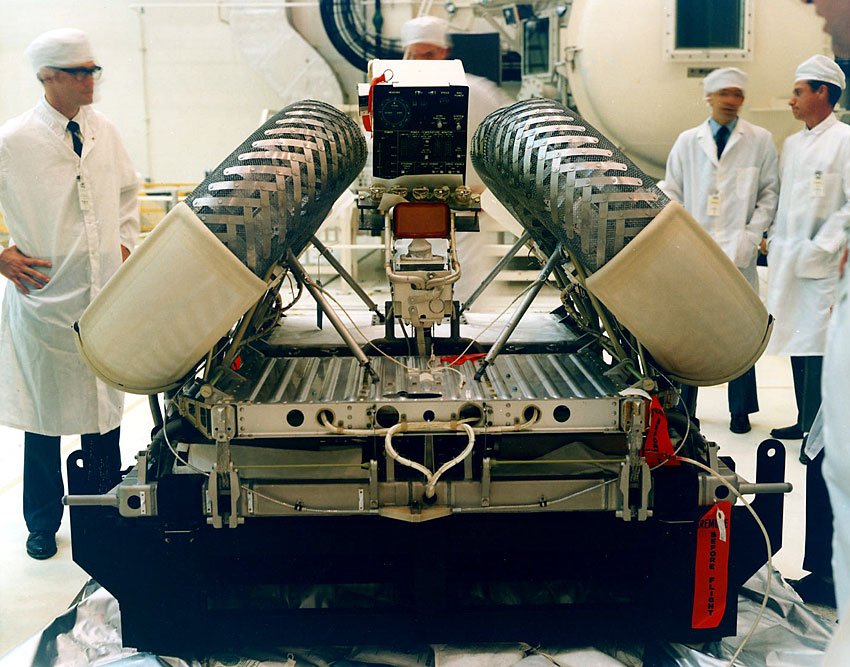
Il trasporto sul LM
Per portarlo sulla Luna l’LRV doveva essere ripiegato per adattarsi al lato del modulo lunare. Dopo l’atterraggio, l’LRV doveva aprirsi dalla sua configurazione stivata, il tutto con la minima assistenza degli astronauti.

Un progetto creato da zero.
La mancanza di atmosfera sulla Luna, gli estremi della temperatura superficiale, la gravità molto ridotta e molte altre incognite associate al suolo e al suolo lunare imposero dei requisiti al LRV che non avevano controparti nei veicoli terrestri e per i quali non esisteva alcuna esperienza terrestre.
Il costruttore.
L’LRV è stato costruito dalla Boeing Co., Aerospace Group, sotto contratto con il NASA-Marshall Space Flight Center. Furono costruiti tre veicoli operativi, più sette unità di test e addestramento, componenti di ricambio e relative attrezzature.
Autonomia.
L’LRV era progettato per funzionare per 78 ore. Poteva arrivare teoricamente fino a una distanza cumulativa di 65 chilometri però, a causa delle limitazioni nel sistema PLSS (Portable Life Support System) degli astronauti, la portata del veicolo fu limitata a un raggio di circa 9,5 chilometri dal modulo lunare. In caso di avaria al LRV gli astronauti dovevano poter tornare a piedi e in sicurezza.
Credit immagini e video: NASA